
Telset.id – Para peneliti di Massachusetts Institute of Technology (MIT) berhasil mengembangkan sistem robotik yang mampu memprediksi lintasan bola tenis meja dan menyesuaikan ayunan raket secara real-time. Teknologi ini dikembangkan oleh Biomimetic Robotics Laboratory MIT dan telah dipublikasikan dalam jurnal arXiv.
Robot ini menggunakan lengan humanoid khusus yang dirancang untuk menghasilkan torsi tinggi dengan inersia rotor rendah. “Kami menunjukkan kemampuan untuk mengadaptasi lintasan guna memenuhi objek yang bergerak dinamis,” kata David Nguyen, salah satu peneliti, seperti dikutip Telset.id dari Phys.org.
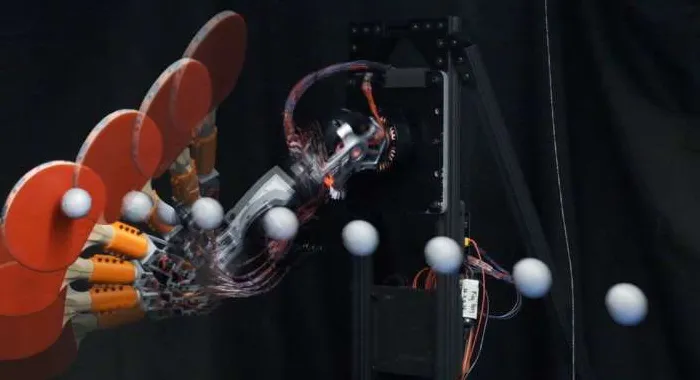
Sistem ini terdiri dari dua komponen utama: modul persepsi yang melacak pergerakan bola, dan modul aktuasi yang mengontrol gerakan lengan robot. Dalam pengujian, robot berhasil memukul bola dengan tingkat keberhasilan 88% dan kecepatan keluar rata-rata 11 m/s.
“Kami menggunakan masalah optimasi nonlinier yang menghasilkan lintasan ayunan untuk lengan,” jelas Kendrick Cancio, peneliti lain dalam proyek ini. “Pengontrol prediktif model kami terus-menerus memecahkan masalah lintasan lengan ini.”
Baca Juga:
Menurut tim peneliti, teknologi ini tidak hanya berguna untuk olahraga. “Meskipun tenis meja tidak akan menyelamatkan nyawa, kontrol semacam ini bisa digunakan dalam situasi pencarian dan penyelamatan yang sulit,” tambah Nguyen.
Ke depan, tim berencana meningkatkan kemampuan sistem dengan memperluas ruang kerja lengan menggunakan gantry. Mereka juga ingin meningkatkan kecepatan bola keluar dan beralih ke pelacakan bola tenis meja standar untuk membandingkan kinerja dengan manusia.
Perkembangan robotik dalam olahraga terus menunjukkan kemajuan signifikan. Sebelumnya, Telset.id juga melaporkan tentang Tennix, robot pelatih tenis pertama di dunia yang mampu memukul bola dengan kecepatan 120 km/jam.
Penelitian ini membuktikan bahwa pendekatan berbasis model masih memiliki tempat dalam pengembangan sistem robotik berkinerja tinggi. Tim MIT berharap dapat menerapkan algoritma kontrol ini untuk tugas-tugas manipulasi dinamis lainnya di masa depan.